Mô-đun đầu vào và đầu ra: Mọi thứ bạn cần biết
Thời gian:2024-10-21 17:01:03
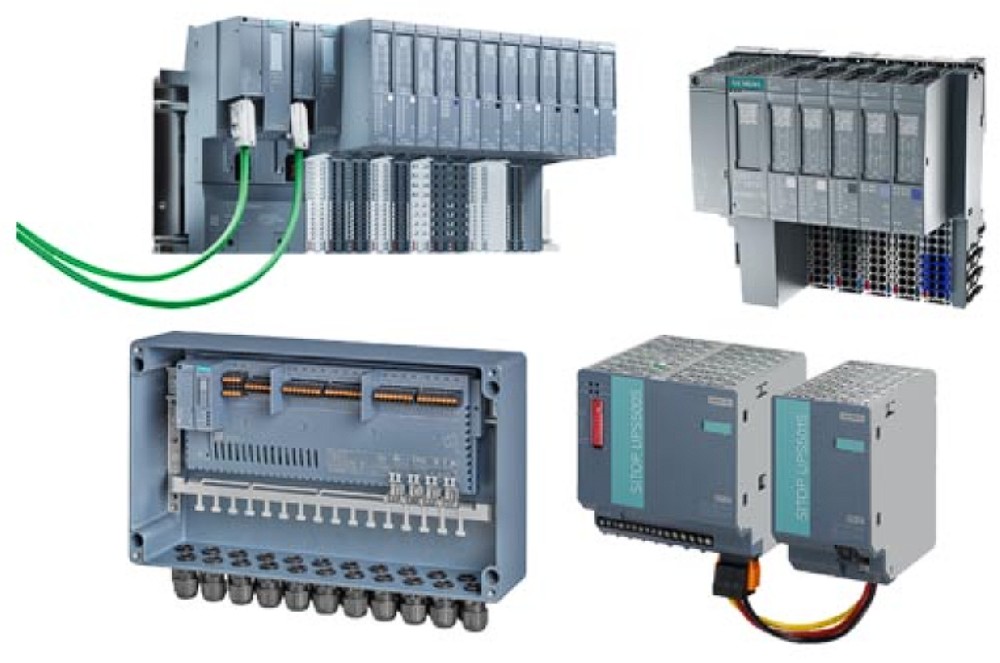
Mô-đun I/O (mô-đun đầu vào/đầu ra) quản lý giao tiếp giữa CPU và mạng, bao gồm truyền dữ liệu, quản lý tải điện và điều khiển chức năng máy. Nó cho phép các nhà tích hợp hệ thống kết nối các thiết bị khác nhau và quản lý tốt hơn các mạng công nghiệp, đặc biệt là xử lý các máy móc, thiết bị và hệ thống cũ không thể giao tiếp tự nhiên bằng các giao thức công nghiệp cần thiết.
1. Tổng quan về mô-đun I/O
Chức năng chính
Phát hiện lỗi: Nó có khả năng phát hiện lỗi và có thể xác định và báo cáo lỗi cho CPU bằng các phương pháp như bit chẵn lẻ.
Truyền thông bộ xử lý
Command Decode: Nhận và giải thích các lệnh được gửi bởi bộ xử lý.
Trao đổi dữ liệu: Tạo điều kiện trao đổi dữ liệu giữa các thiết bị ngoại vi, bộ xử lý và bộ nhớ chính.
Status Report: Báo cáo cập nhật trạng thái bộ xử lý cho thiết bị ngoại vi.
Address Decode: Tổ chức các thiết bị ngoại vi được kết nối bằng cách quản lý các địa chỉ duy nhất.
Bộ đệm dữ liệu: Kiểm soát tốc độ truyền dữ liệu từ bộ xử lý đến thiết bị ngoại vi và bù đắp cho độ trễ của thiết bị ngoại vi.
Device Communication: Giao tiếp giữa các thiết bị ngoại vi được kết nối.
Kiểm soát và thời gian: Giám sát các giao dịch dữ liệu giữa các hệ thống nội bộ và thiết bị ngoại vi.
2. Các loại phương pháp truyền thông I/O
Lập trình I/O: Việc truyền dữ liệu từ thiết bị I/O vào bộ nhớ yêu cầu chương trình khởi động CPU sẽ tiếp tục lưu thông cho đến khi thiết bị I/O sẵn sàng truyền dữ liệu.
Interrupt Drive I/O: CPU đưa ra lệnh đọc cho thiết bị I/O, gửi tín hiệu ngắt đến bộ xử lý khi thiết bị sẵn sàng truyền dữ liệu, sau đó CPU kiểm tra trạng thái thiết bị và ghi thông tin vào bộ nhớ khi thiết bị sẵn sàng.
Truy cập bộ nhớ trực tiếp (DMA): Các thiết bị I/O có thể gửi và nhận dữ liệu trực tiếp từ bộ nhớ, bỏ qua CPU hoàn toàn, tăng tốc độ hoạt động của bộ nhớ.
3. Loại mô-đun đầu vào và đầu ra
Loại đầu vào: Sensor Input, Digital Input, Analog Input.
Loại đầu ra: đầu ra điều khiển, đầu ra kỹ thuật số trực tiếp, đầu ra kỹ thuật số điều chế, đầu ra analog, truyền dữ liệu (song song và nối tiếp).
4. Vai trò của mô-đun I/O trong PLC
Các mô-đun I/O được tích hợp hoặc thêm vào PLC để tăng cường chức năng, kết nối và kiểm soát quá trình của chúng. Chúng quản lý giao tiếp đến của PLC và thực hiện các lệnh được gửi bởi bộ xử lý, cho phép phát hiện lỗi, trao đổi dữ liệu, đệm thông tin và giám sát các giao dịch dữ liệu giữa các hệ thống nội bộ và thiết bị ngoại vi.
5. Sự khác biệt giữa I/O tương tự và I/O kỹ thuật số
Tín hiệu tương tự: là liên tục và đại diện cho một phạm vi các giá trị liên tục thay đổi theo thời gian, chẳng hạn như các phép đo sóng âm, dòng điện hoặc điện áp.
Tín hiệu kỹ thuật số: Hoạt động ở dạng nhị phân, thường được biểu thị là "bật" hoặc "tắt", "1" hoặc "0", là rời rạc và không liên tục như tín hiệu analog. Với sự phổ biến của công nghệ kỹ thuật số, I/O kỹ thuật số đang trở thành tiêu chuẩn để thu thập dữ liệu, nhưng tín hiệu analog vẫn đang được sử dụng và cũng có thể được chuyển đổi thành tín hiệu kỹ thuật số.
-
 202309-01
202309-01Camera Hikvision chỉ ra rằng truy cập mạng là bất thường
1. Kiểm tra xem mạng có ổn định không và xảy ra mất gói tin.2. Kiểm tra xem địa chỉ IP có xung đột hay không.3. Kiểm tra xem nguồn điện của thiết bị có bình thường không···
-
 202212-30
202212-30Bảng điều hành Siemens (HMI) số thứ tự hoàn thành
Số thứ tự bảng điều khiển (HMI) của Siemens đã hoàn thành - Số thứ tự màn hình cảm ứng của Siemens đã hoàn thành
-
 202301-06
202301-06Schneider cách ly chuyển đổi hoạt động cần thiết
Các tính năng của công tắc rào cản Schneider: Trước hết, công tắc rào cản Schneider có thể được sử dụng để chặn nguồn điện, nó có thể ngắt kết nối thiết bị trực ti···
-
 202305-26
202305-26Hướng dẫn ngắt THÔNG MINH Siemens s7-200
Bộ điều khiển lập trình dòng S7-200 SMART * * có 38 nguồn ngắt (9 nguồn dành riêng), được chia thành ba loại: ngắt giao tiếp, ngắt đầu vào / đầu ra (I / O) và ngắt cơ sở ···
-
 202212-29
202212-29Ghi chú về việc sử dụng bộ chuyển đổi tần số Siemens
1. Phía đầu ra của bộ chuyển đổi tần số Siemens không thể shunt để bù tụ điện, cũng không thể shunt tụ điện để giảm sóng hài cao của điện áp đầu ra của bộ chuyển ···


 +8618621383628
+8618621383628 +8613811814778
+8613811814778 info@zhongpingtech.com
info@zhongpingtech.com 26 biệt thự ở cộng đồng Liyuan, quận Triều Dương, Bắc Kinh, Trung Quốc
26 biệt thự ở cộng đồng Liyuan, quận Triều Dương, Bắc Kinh, Trung Quốc