Siemens PLC điều khiển Yamaha robot
Thời gian:2023-01-28 16:00:06
Bài viết này giới thiệu chiến lược điều khiển của Yamaha robot do Siemens PLC điều khiển, sử dụng cổng IO bên ngoài để đặt từ lệnh, để PLC có thể giao tiếp với robot và hướng dẫn robot hoàn thành hành động tương ứng.
Siemens S7-300PLC là một PLC lớn và vừa được sử dụng rộng rãi ở nước ta hiện nay, nghiên cứu về nó và chiến lược điều khiển robot ngoại vi trong lĩnh vực tự động hóa thiết bị có ý nghĩa rất lớn. Trong bài báo này, dựa trên nghiên cứu và sản xuất dòng pin lithium, việc liên lạc và điều khiển Siemens S7300PLC và Yamaha robot đã hoàn thành, và việc nghiên cứu và phát triển hai quy trình chính của thanh thép và dập trong quá trình thiết bị pin lithium đã hoàn thành.
1. Thiết kế phần cứng tổng thể
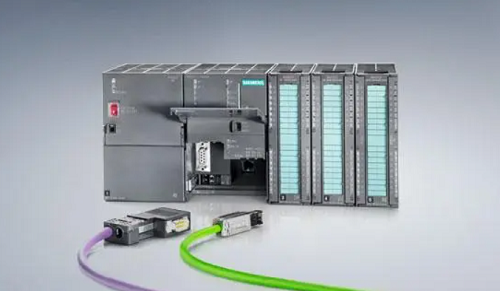
Kết nối bộ điều khiển robot Siemens S7-300PLC và YAMAHA cần kết nối tín hiệu khởi động robot, tín hiệu dừng khẩn cấp, tín hiệu lỗi và tín hiệu đặt lại, thông qua bốn nhóm tín hiệu và kết nối PLC có thể đạt được các yêu cầu cơ bản của robot điều khiển. PLC được kết nối với robot. Nói chung, PLC được sử dụng làm bên hướng dẫn gửi và robot được sử dụng làm bên hướng dẫn nhận. Để đạt được mục đích của robot điều khiển PLC đi bộ đến từng điểm, cần thiết lập giao tiếp tín hiệu PLC và robot IO.
Kết hợp với nghiên cứu công nghệ về quy trình đặt và dập thép trong quá trình thiết bị pin lithium, thu được rằng các điểm đi bộ của robot sẽ không vượt quá 16 điểm. Theo tính toán các điểm bằng 8421, các điểm kết nối của robot và PLC là 4 điểm. Robot tiêu chuẩn PNP được chọn để kết nối với Siemens. Kết nối tín hiệu bao gồm hai phần: một phần là tín hiệu khởi động, dừng khẩn cấp, lỗi và đặt lại; Một phần là đường truyền thông giữa PLC và robot tại bốn điểm; Có tám bộ tín hiệu.
2. Thiết kế phần mềm tổng thể
Chiến lược điều khiển phần mềm cho yêu cầu robot, phương pháp lệnh PLC để thực hiện toàn bộ điều khiển. Lấy robot xếp chồng làm ví dụ, robot gửi tín hiệu 1001 yêu cầu sau khi quay trở lại, robot nhận tín hiệu theo yêu cầu kỹ thuật, robot được hướng dẫn đi đến hướng mục tiêu, tín hiệu định hướng mục tiêu là (0001 - 1011) tổng cộng 9 điểm, lấy vị trí điểm robot di chuyển tại chỗ, cùng nhau tại chỗ sau khi gửi tín hiệu để thông báo cho robot tại chỗ, Robot điều khiển hành động của các thiết bị ngoại vi khác (xi lanh, động cơ, v.v.) và yêu cầu robot quay trở lại vị trí sau khi hành động kết thúc. Sau khi robot trở lại vị trí, nó tiếp tục chờ hướng dẫn cài đặt. Một vòng lặp hành động kết thúc.
Thông qua giao tiếp và điều khiển giữa Siemens S7-300PLC và Yamaha robot, việc nghiên cứu và phát triển thanh thép và dập hai quy trình chính trong quá trình thiết bị pin lithium đã hoàn thành. PLC và robot thông qua phương pháp liên kết cuối truyền tín hiệu được sử dụng trong lĩnh vực thiết bị pin, có vai trò trình diễn tốt; Có thể được sử dụng trong chuỗi thiết bị pin khác, phương pháp điều khiển PLC và robot tham chiếu khác và chiến lược điều khiển, có thể kết thúc hầu hết các robot điều khiển PLC đến điểm làm việc, có tác dụng quảng bá tốt.
-
 202302-07
202302-07WEINVIEW TK6070ih màn hình cảm ứng vào cài đặt hệ thống các phương pháp là gì?
1. Nói chung, có một nút mũi tên nhỏ màu đen ở góc dưới bên phải của màn hình cảm ứng. Sau khi nhấp và nhập đúng mật khẩu, bạn có thể vào Cài đặt hệ thống. Tuy nhiê···
-
 202302-10
202302-10Giải thích tham số của rơle Omron
Điện áp làm việc định mức (dòng điện):Còn được gọi là điện áp cuộn dây, nó đề cập đến điện áp hoặc dòng điện mà rơle có thể hoạt động đáng tin cậy. Khi rơ···
-
 202212-29
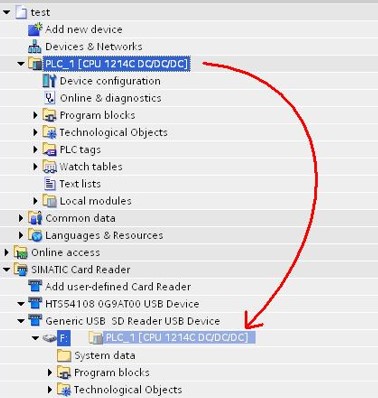
202212-29Siemens nạp vật phẩm vào thẻ nhớ ở chế độ truyền
Tải các mục vào thẻ nhớ ở chế độ truyềnBước 1: Đặt thẻ nhớ ở chế độ "chuyển thẻ" theo phương pháp trên. Bạn nên xóa tất cả các tệp khỏi thẻ nhớ trước khi thực h···
-
 202302-16
202302-16Giải pháp cho vấn đề giao tiếp MCGS
1. Cách kiểm tra trạng thái giao tiếp của thiết bị trong Chế độ Kunlun (MVGS)Trong tất cả các thiết bị không có bo mạch MCGS (ngoại trừ một số thiết bị tùy chỉnh), kênh * *···
-
 202302-16
202302-16Kết nối màn hình cảm ứng Mitsubishi 5U PLC và MCGS
Trước hết, hãy nhìn vào giao diện Cài đặt của màn hình cảm ứng Kunlun.1. Nhấp vào cửa sổ thiết bị để nhập Thêm PLC2. Thêm cổng nối tiếp mẹ TCP và thêm thiết bị 5U bê···


 +8618621383628
+8618621383628 +8613811814778
+8613811814778 info@zhongpingtech.com
info@zhongpingtech.com 26 biệt thự ở cộng đồng Liyuan, quận Triều Dương, Bắc Kinh, Trung Quốc
26 biệt thự ở cộng đồng Liyuan, quận Triều Dương, Bắc Kinh, Trung Quốc