Bốn chế độ điều khiển của ABB cho robot công nghiệp
Thời gian:2023-01-17 16:55:29
I. Chế độ điều khiển điểm (PTP)
Chế độ điều khiển này chỉ điều khiển vị trí của các điểm rời rạc được chỉ định bởi hiệu ứng cuối của robot công nghiệp trong không gian làm việc. Khi điều khiển, chỉ cần robot công nghiệp để có thể di chuyển giữa các điểm liền kề một cách nhanh chóng và chính xác và không có quy định về quỹ đạo để đến điểm mục tiêu.
Độ chính xác định vị và thời gian cần thiết cho chuyển động là hai chỉ số kỹ thuật của chế độ điều khiển này. Bởi vì chế độ điều khiển này có các đặc điểm của việc thực hiện đơn giản và yêu cầu độ chính xác định vị thấp, nó thường được sử dụng trong việc bốc dỡ vật liệu, xử lý, hàn điểm, lắp đặt các bộ phận trên bảng mạch, v.v., miễn là hoạt động chính xác của vị trí đầu cuối được duy trì tại điểm đích. Phương pháp này tương đối đơn giản, nhưng rất khó để đạt được độ chính xác định vị 2-3um.
Ii. Chế độ điều khiển quỹ đạo liên tục (CP)
Chế độ điều khiển là liên tục điều khiển vị trí của hiệu ứng cuối của robot công nghiệp trong không gian làm việc, theo đúng quỹ đạo và tốc độ xác định trước trong một phạm vi chính xác nhất định, điều khiển tốc độ, quỹ đạo trơn tru, chuyển động trơn tru, để hoàn thành nhiệm vụ.
Mỗi khớp của robot công nghiệp di chuyển liên tục và đồng bộ, và đầu cuối của nó có thể tạo thành một quỹ đạo liên tục. Chỉ số kỹ thuật chính của chế độ điều khiển này là độ chính xác theo dõi quỹ đạo và độ ổn định của vị trí của đầu cuối của robot công nghiệp. Các chế độ điều khiển của hàn hồ quang, sơn phủ, tẩy lông và kiểm tra robot thường được áp dụng.
Ba, chế độ điều khiển lực (thời điểm).
Lắp ráp, nắm bắt công việc của đối tượng, không chỉ yêu cầu định vị chính xác mà còn yêu cầu sử dụng lực và mô-men xoắn thích hợp, phải sử dụng chế độ servo (mô-men xoắn). Nguyên tắc của chế độ điều khiển này về cơ bản giống như điều khiển servo vị trí, nhưng đầu vào và phản hồi không phải là tín hiệu vị trí, mà là tín hiệu lực (thời điểm), vì vậy hệ thống phải ép cảm biến (thời điểm). Đôi khi các chức năng gần, trượt và cảm biến khác được sử dụng để điều chỉnh tình huống điều khiển.
Bốn, chế độ điều khiển thông minh.
Điều khiển thông minh của robot là thu thập kiến thức về môi trường xung quanh thông qua cảm biến và đưa ra các quyết định tương ứng theo cơ sở kiến thức bên trong của nó. Sử dụng công nghệ điều khiển thông minh, robot có khả năng thích ứng mạnh mẽ với môi trường và khả năng tự học.
Sự phát triển của công nghệ điều khiển thông minh phụ thuộc vào sự phát triển nhanh chóng của trí tuệ nhân tạo như mạng nơ-ron nhân tạo, thuật toán gen, thuật toán di truyền và hệ thống chuyên gia trong những năm gần đây. Chế độ điều khiển này, tài năng robot công nghiệp thực sự có thể có hương vị hạ cánh của trí tuệ nhân tạo, nhưng khó kiểm soát nhất, ngoài thuật toán, mà còn phụ thuộc nhiều vào độ chính xác của các thành phần.
Từ bản chất của điều khiển, robot công nghiệp hiện nay thường ở giai đoạn điều khiển định vị không gian tương đối thấp, nội dung thông minh không lớn, có thể nói nó chỉ là một cánh tay robot tương đối linh hoạt và có khoảng cách xa con người.

-
 202302-14
202302-14Phương pháp bảo trì bộ chuyển đổi tần số ABB
Phương pháp sửa chữa bộ chuyển đổi tần số ABB cần được nắm bắt đúng cách. Bộ chuyển đổi tần số bao gồm các thành phần khác nhau, trong đó hiệu suất của một số thà···
-
 202301-11
202301-11Các tính năng chính của máy tính công nghiệp Advantech và các biện pháp phòng ngừa khi sử dụng
Các đặc điểm chính của máy tính công nghiệp Advantech:1. Máy tính công nghiệp Advantech đòi hỏi khả năng làm việc liên tục trong một thời gian dài.2, khung gầm có nguồn đ···
-
 202302-08
202302-08Giảm các biện pháp can thiệp biến tần Schneider
(1) Điện cảm và điện dung được thêm vào phía đầu vào của biến tần Schneider để tạo thành mạng lọc LC.(2) Đường dây điện của biến tần Schneider được cung cấp trực ···
-
 202301-28
202301-28Siemens PLC điều khiển Yamaha robot
Bài viết này giới thiệu chiến lược điều khiển của Yamaha robot do Siemens PLC điều khiển, sử dụng cổng IO bên ngoài để đặt từ lệnh, để PLC có thể giao tiếp với robot và···
-
 202212-29
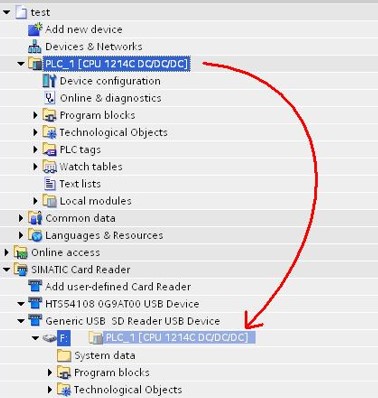
202212-29Siemens nạp vật phẩm vào thẻ nhớ ở chế độ truyền
Tải các mục vào thẻ nhớ ở chế độ truyềnBước 1: Đặt thẻ nhớ ở chế độ "chuyển thẻ" theo phương pháp trên. Bạn nên xóa tất cả các tệp khỏi thẻ nhớ trước khi thực h···


 +8618621383628
+8618621383628 +8613811814778
+8613811814778 info@zhongpingtech.com
info@zhongpingtech.com 26 biệt thự ở cộng đồng Liyuan, quận Triều Dương, Bắc Kinh, Trung Quốc
26 biệt thự ở cộng đồng Liyuan, quận Triều Dương, Bắc Kinh, Trung Quốc